PS2無線手把馬達驅動板,馬達控制篇
這塊馬達驅動板整合得非常好,PS2無線手把的接收器插座、可控制4顆直流馬達、4顆伺服馬達,I2C也特別引出,真的是智慧車專案的最佳選擇啊!
這塊馬達驅動板整合得非常好,PS2無線手把的接收器插座、可控制4顆直流馬達、4顆伺服馬達,I2C也特別引出,真的是智慧車專案的最佳選擇啊!
擴展板特色:
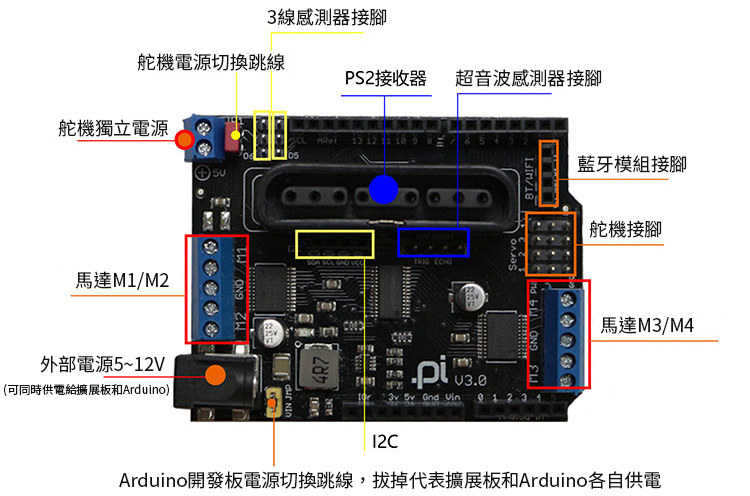
1、提供專用PS2無線手把接口,並可完全插接到arduino uno開發板上
2、通過I2C和arduino通訊,可疊加級聯
3、可接6個舵機,其中2個由Arduino直接控制,另外4個由PWM驅動器驅動。
4、可接4個直流有刷馬達 或者 2個4線步進電機。
5、使用了TB6612FNG電機驅動芯片,1.2A驅動能力,峰值3.2A,秒殺L298N模塊
6、含完整的示例教程和代碼庫。
7、支持超聲波傳感器接口和藍牙模組介面。程式一點也不難寫,只要裝好必須的函式庫,程式超簡單的。主要分成兩大部份:1,馬達部份用的是Adafruit的Motor Shield函式庫。2,PS2無線手把用的是PS2X函式庫。
PS2無線手把部份,請參考另一篇教學,範例可以完全套用:Arduino結合PS2無線手把簡單上手
以下分成兩個版本,若是2019年的版本,請用以下的方法:
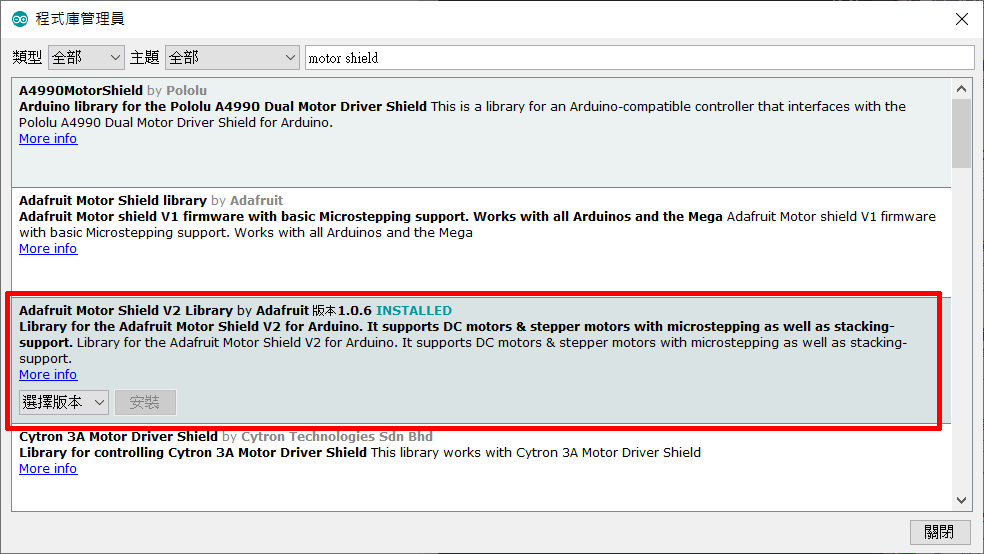
我們先安裝Adafruit的Motor Shield函式庫。
若是2020年後的版本,我們要安裝擴展板的整合函式庫。
下載網址:http://jmaker.banner.tw/doc/Motor_Shield_Library_V5.zip
下載後解壓縮,把整個目錄放到電腦中的「Documents\Arduino\libraries」。
因為是擴展板,幾乎沒什麼線要處理的,只要把馬達正負線接好,就算完成了!這款擴展板可以接4顆馬達,這次用到兩顆,分別接在M1和M4。
傑森寫了一支簡單的範例程式:
Adafruit_DCMotor *myMotor = AFMS.getMotor(1); //左馬達接在M1
Adafruit_DCMotor *myMotor2 = AFMS.getMotor(4); //右馬達接在M4這兩行就是在建立兩顆馬達物件,記得編號別寫錯就行了。
至於馬達的控制就太簡單了,這三行就能控制正反轉,還有馬達的速度了:
myMotor->setSpeed(carSpeed); //控制速度 0~255
myMotor->run(FORWARD); //馬達正轉
myMotor2->run(BACKWARD); //馬達反轉是不是很簡單呢?
PS2無線手把馬達驅動擴展板賣場:
https://reurl.cc/GkjQdv